VTOL無人機 AutoPilot のハードウエアを製作しました。
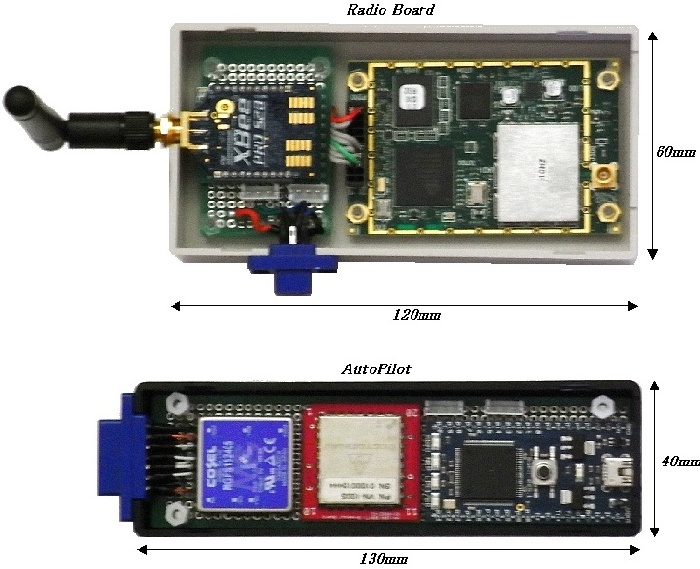
主要性能
| CPU動作周波数 | 最大100MHz |
|---|---|
| 入出力 | PWM出力6ch PWM入力6ch アナログ入力6ch |
| Gyro bias stability | 10°/hr |
| GPS水平位置精度 | 0.7m RMS (w/SBAS) |
GPS受信機は、NovAtel社の製品を、アムテックス様より購入させていただきました。
株式会社アムテックス http://www.amtechs.co.jp/index.html/
マイコンと開発環境は、mbed PLC 1768 を採用しています。
mbed Development Platform for Devices http://mbed.org/